下面我们简要而简洁地总结了许多常见问题 (FAQ) 的答案。 您会发现它们按主题和产品分类。 如果您的问题未列出,请随时直接联系我们。
ILM / ILM-E 伺服套件 FAQ
ILM“STD”和 ILM“HS”版本之间有什么区别?
我们的定子的标准 (STD) 和高速 (HS) 版本在铁合金和层压板厚度方面有所不同。在“HS 版本”中,我们使用一种合金,可降低较高转速下的动态损耗。这可以通过重新磁化铁(磁滞损耗和涡流损耗)来实现。两个版本的数据表相同。
ILM 和 ILM-E 无框伺服套件之间的主要区别是什么?
ILM 定子用环氧树脂浇铸而成,而 ILM-E 具有开路绕组并粘合在一起。此外,ILM-E 具有塑料极帽,而不是像 ILM 定子那样使用绝缘纸。ILM 定子具有 THT 霍尔和温度传感器,而 ILM-E 具有 SMD 霍尔和温度传感器。
ILM 和 ILM-E 伺服套件如何集成?
ILM 定子通过粘合集成到外壳中,而 ILM-E 定子则通过收缩配合到外壳中。
但 ILM 和 ILM-E 转子的集成方式相同。
它们都将粘在轴上。 查看 TQ-ILM-E 集成的说明:
您的无框伺服套件属于哪一类电机?
我们的 ILM 和 ILM-E 伺服套件属于具有正弦反电动势波形的永磁同步电机 (PMSM) 类别。
您的无框伺服套件的额定电压是如何定义的?
额定电压是设计标准,定义为 48 V(或 ILM25/38 为 24 V)。我们的电机满足所有要求,例如“UL 标准、EC 指南和 ISO DIN EN 标准”。
您的无框伺服套件的电流值是如何定义的?
我们的伺服套件具有四倍的过载能力,线性饱和度为 20%。峰值电流的测量值为电机扭矩持续下降其标称值的 20% 时的电流。如果将此峰值电流值除以 4,您将得到电机的额定电流。
电机扭矩常数和反电动势常数之间有何关系?
对于我们的伺服套件,电机扭矩常数 kT{ Nm/A } 和反电动势常数 kE{ V/krpm } 具有以下关系: (√3/2) * (60/2π) * kE
感应电压如何随空载速度变化?
感应电压随电机空载速度线性变化。
如何计算电机电气时间常数?
可以使用数据表中的终端电阻和终端电感值计算电机电气时间常数: te = LTT/RTT
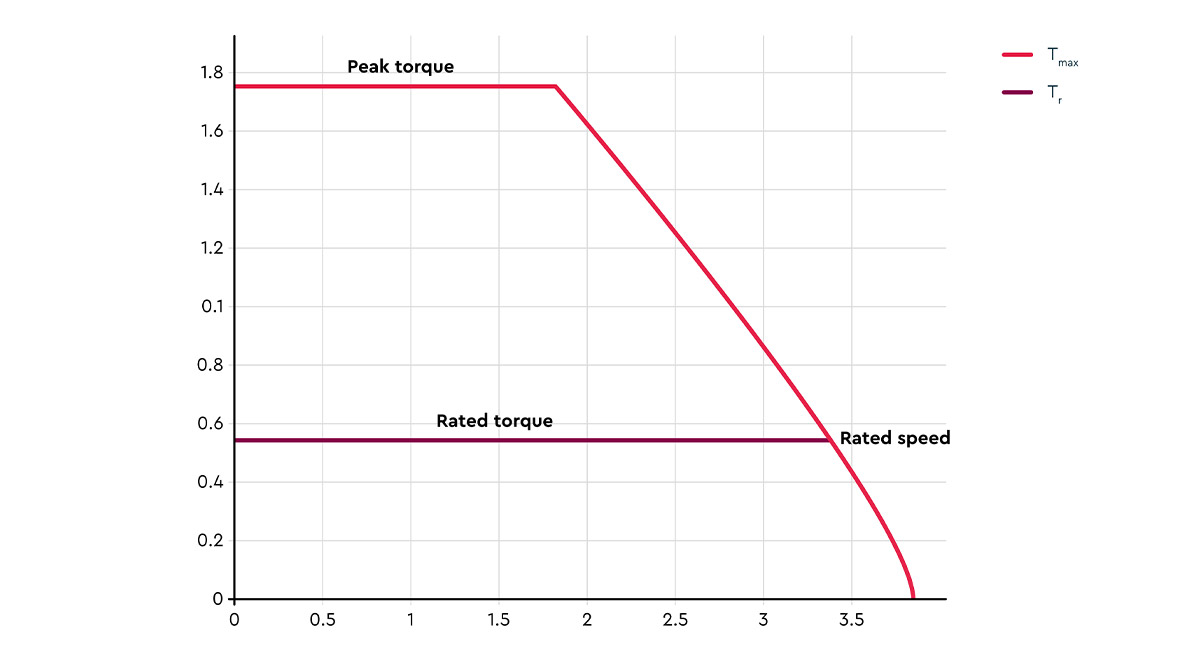
如何从数据表中的 T-N 图测量电机额定转速?
我们的电机仅测量最大空载转速。但是,我们可以使用数据表中特定互连的 T-N 图找出电机的额定转速,如图所示:
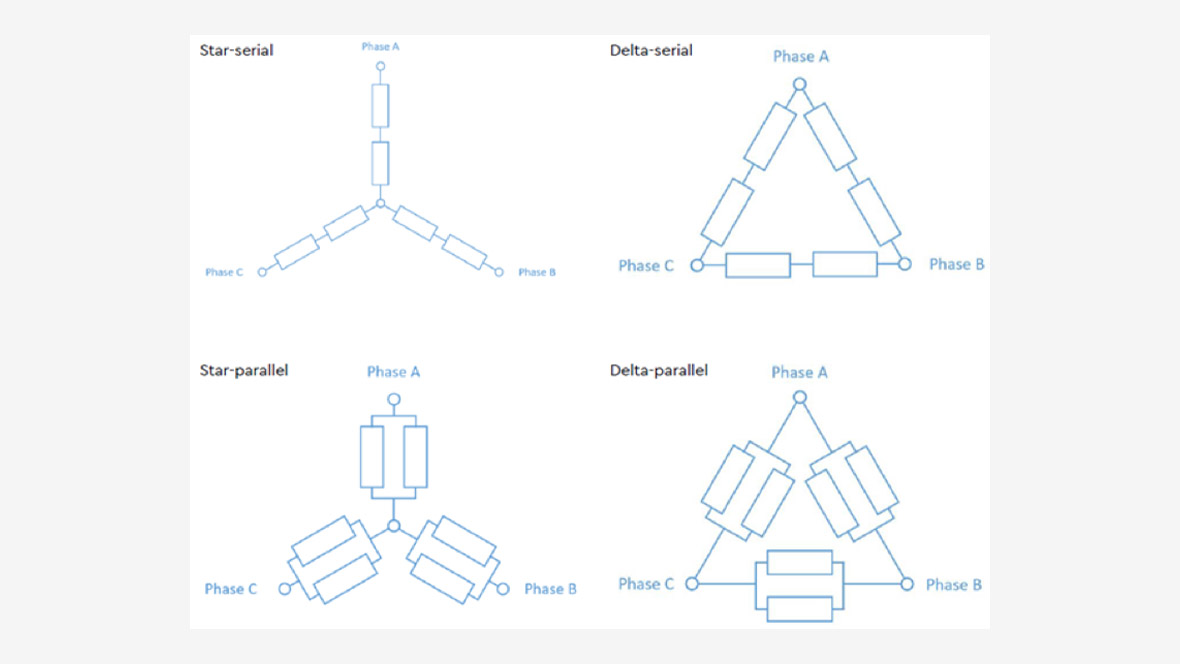
“TQ 无框伺服套件”的可用定子绕组配置是什么?
定子绕组配置的变化来自我们的互连 PCB,该 PCB 焊接到定子的 12 个引脚上。我们可以为我们的伺服套件提供以下互连:
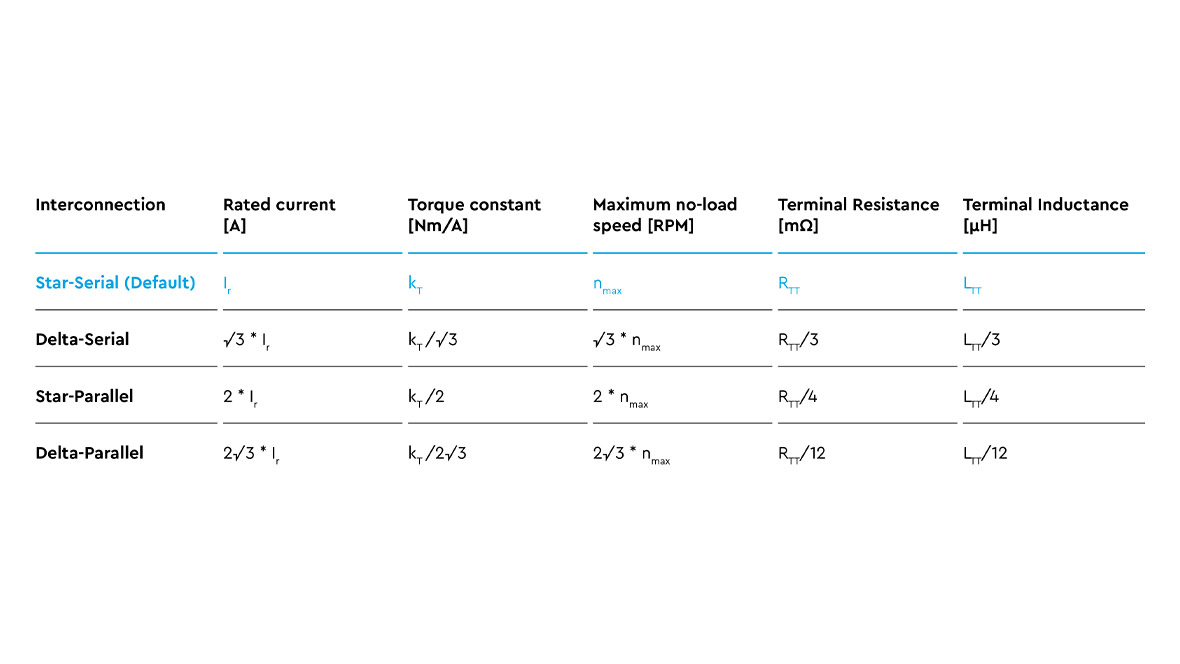
绕组互连的变化如何影响电机参数?
对于给定的电源电压,额定和峰值扭矩、铜损和效率在所有互连中保持不变。
下表列出了所有可用互连中发生变化的其他参数:
为什么电机扭矩常数在峰值扭矩时不是线性的?
根据我们的测试台测量,电机扭矩常数在整个扭矩范围内不是线性的,但在峰值扭矩时趋于进入 20% 的线性饱和状态。
额定电流是峰值还是 RMS 值?
我们的数据表中指定的额定电流值是峰值。
电机性能如何随环境温度而变化?
我们的所有数据表参数均在室温 20-22°C 下测量。根据我们的 S1 曲线,电机产生连续扭矩的能力会随着环境温度的升高而下降。在为客户应用选择合适的电机尺寸时必须考虑这一点。
您的无框伺服套件如何实现高扭矩密度?
我们行业领先的扭矩密度的主要原因是:
- 通过正交单齿绕组实现非常高的铜填充系数
- 金属片切割的精确几何形状和铜铁比
- 通过使用导热胶以及定子绕组的真空灌封,使定子与外壳之间具有良好的热连接
“TQ 无框伺服套件”的铜损如何计算?
稳态运行期间的铜损计算公式为:
PΩ = 3 * (Irated/√2)2 * RTT/2
你们的无框伺服套件的最大工作温度是多少?
我们的无框伺服套件的最大工作温度为 125°C。
你们的伺服套件是否提供“霍尔传感器”和“温度传感器”?
是的,我们提供霍尔和温度传感器。ILM-E 包含霍尔和温度传感器。ILM 包含温度传感器,霍尔传感器可能需要额外收费。
为什么我需要双转子或加长转子来安装 ILM 伺服套件的霍尔版本?
原因是霍尔传感器位于 PCB 顶部。普通定子太短,因此需要延长。否则,霍尔传感器无法准确检测转子位置。
伺服驱动器/逆变器方面有哪些要求?
我们的伺服套件需要伺服驱动器/逆变器,该驱动器/逆变器可以支持正弦换向并且 PWM 频率高于 16 kHz。
您会推荐任何合适的伺服驱动器/逆变器吗?
我们推荐 Elmo Motion Control 和 Synapticon 的伺服驱动器/逆变器。这两家公司的产品与我们的电机配合良好。
编码器 FAQ
您提供哪种类型的标准位置编码器?
我们提供以下两种标准位置编码器:
- 1. 带 BiSS-C 协议的绝对 AksIM 编码器(离轴编码器)
- 2. 模拟正弦/余弦编码器(轴上编码器)
您的绝对编码器是否具有断电期间存储多圈计数的功能?
是的,我们的绝对编码器具有断电期间存储多圈计数的功能。此信息以电子方式存储,但在编码器未通电的情况下运动时不会更新。
安全制动器 FAQ
您的无框伺服套件提供哪种安全制动器?
我们的无框伺服套件仅标配电磁安全制动器。
为什么我们需要为制动器提供过励磁电压?
由于安全制动器是弹簧施加的电磁制动器,因此线圈必须最初以 24 V 的过励磁电压通电 100 毫秒,才能释放制动器。一旦制动器在此时间段内释放,电压水平必须降低至标称值 8 V。有关更多信息,请参阅安装和操作手册。
安全制动器可以用于太空/真空应用吗?
我们的安全制动器不适用于太空/真空应用。有关更多信息,请参阅安装和操作手册。